
近日,公司控制理论与控制工程专业博士研究生杨毅森在钻井工具姿态估计方面取得进展,相关研究成果《Attitude Estimation for Drilling Tools Based on Robust State-Constrained Zonotopic Observer》发表在《IEEE Sensors Journal》。《IEEE Sensors Journal》是仪器仪表领域的国际知名期刊,目前影响因子为4.5(SCI三区)。论文第一作者为博士生杨毅森,通讯作者为耿艳峰教授,BB贝博艾弗森为唯一署名单位和通讯单位,该研究得到国家自然科学基金重点项目、山东省重点研发计划项目等项目的资助支持。
图1 论文首页
钻井工具的姿态估计对于钻井工程至关重要。然而,现有研究在有界约束利用、不确定性描述和扰动鲁棒性方面存在不足。该论文提出了一种鲁棒状态约束集员观测器,其中有界状态约束被增广,并利用集合协变估计扰动边界。然后,理论分析证明了有界状态约束能够减少估计误差集合尺寸。特别是,利用状态范围约束保证了误差有界性和扰动鲁棒性。最后,仿真和实验结果表明,该方法充分利用了有界约束,具有比现有方法更高的估计精度和更强的扰动鲁棒性。
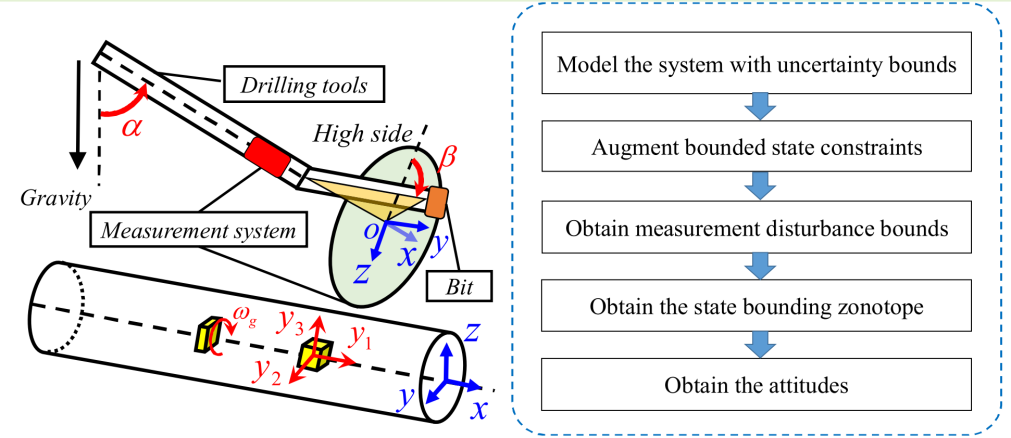
图2钻井工具姿态估计流程
论文链接:https://ieeexplore.ieee.org/document/11049858

 实验教学平台
实验教学平台 集团OA系统
集团OA系统 集团邮件系统
集团邮件系统 相关文件查询
相关文件查询