
近日,公司测控系副教授贾华坤在工业机器人运动学参数辨识方面取得进展,相关研究成果“Industrial robot calibration optimization method based on R-optimal criterion and improved IOOPS algorithm”发表在《Measurement Science and Technology》。《Measurement Science and Technology》是测量科学与仪器技术领域的国际知名期刊,目前影响因子为3.4(中科院3区)。论文第一作者为贾华坤,通讯作者为于连栋教授,BB贝博艾弗森为唯一署名单位和通讯单位,该研究得到国家重点研发计划项目“多自由度非接触三维光学扫描仪”的资助支持。
图1 论文首页
本文提出了一种基于R-最优准则和改进逐位姿迭代搜索算法的新型运动学参数标定方法,旨在提高工业机器人末端执行器的绝对定位精度。首先,建立了一种基于指数积模型和广义误差模型的新型工业机器人误差标定模型,并利用最小二乘法获得了从机器人基坐标系到激光跟踪仪测量坐标系的理想位姿变换矩阵,从而得到了机器人标定系统的初始参数向量。其次,采集了机器人工作空间内不同位置的各种关节角度值以及相应的末端执行器坐标数据,即标定采样点数据。随后,采用改进的IOOPS算法,结合R-最优准则提出的可观测性指标OR,来筛选标定采样点。最后,将优化后的采样点数据与Levenberg–Marquardt算法相结合,对参数进行辨识得到更精确的运动学参数。实验结果表明,使用该方法进行标定后,机器人末端执行器的平均误差从0.582毫米降低至0.249毫米,证明了该方法的有效性。
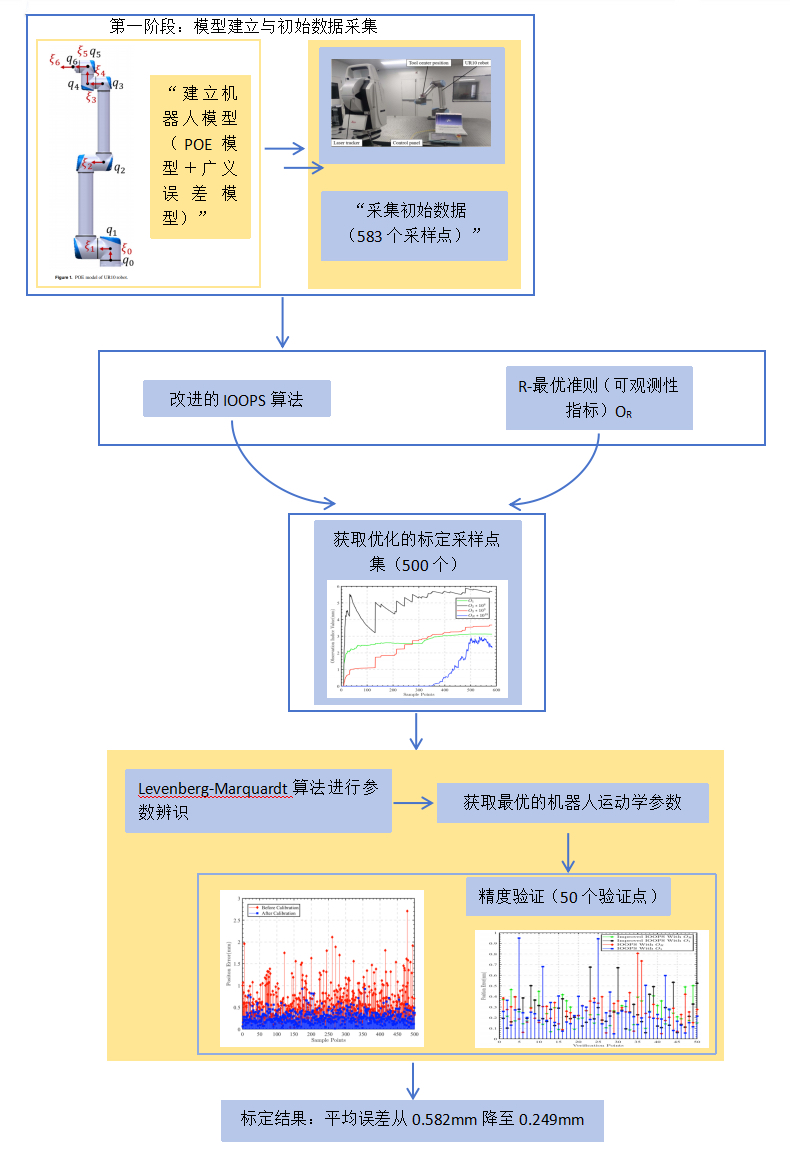
图2工业机器人运动学参数辨识策略
论文链接:https://doi.org/10.1088/1361-6501/ad8176

 实验教学平台
实验教学平台 集团OA系统
集团OA系统 集团邮件系统
集团邮件系统 相关文件查询
相关文件查询